GPmp Tutorial¶
This tutorial builds a Gaussian-process model with GPmp, selects covariance parameters, checks predictions, and inspects one-dimensional cross sections of the predictor. It assumes basic knowledge of Gaussian processes. For background on kriging, covariance models, and parameter selection, see:
Stein, M. L. (1999). Interpolation of Spatial Data: Some Theory for Kriging. Springer.
Chilès, J.-P., & Delfiner, P. (1999). Geostatistics: Modeling Spatial Uncertainty. Wiley.
Rasmussen, C. E., & Williams, C. K. I. (2005). Gaussian Processes for Machine Learning. MIT Press.
Petit, S. J., Bect, J., Feliot, P., & Vazquez, E. (2023). Parameter Selection in Gaussian Process Interpolation: An Empirical Study of Selection Criteria. SIAM/ASA Journal on Uncertainty Quantification, 11(4), 1308-1328. arXiv:2107.06006.
Installation and backend selection¶
For an editable installation, first clone the repository, then run
pip install -e . from the cloned repository root:
git clone https://github.com/gpmp-dev/gpmp.git
cd gpmp
pip install -e .
GPmp selects its numerical backend at import time. Set
GPMP_BACKEND before importing gpmp to choose explicitly:
export GPMP_BACKEND=numpy
or:
export GPMP_BACKEND=torch
If GPMP_BACKEND is not set, GPmp uses PyTorch when available and
otherwise falls back to NumPy. Install PyTorch separately when the
torch backend is desired.
Basics¶
As mentioned above, we use the framework of kriging to obtain the posterior distribution of a Gaussian process from observations. Hereafter, the notation \(\xi \sim \mathrm{GP}(m,k)\) means that \(\xi\) is a Gaussian process with mean function \(m:x\in\mathcal{X}\mapsto\mathrm{E}(\xi(x))\) and covariance function \(k:(x,y)\in\mathcal{X}^2\mapsto \mathrm{cov}(\xi(x),\xi(y))\), with respect to a probability space \((\Omega,\mathcal{B},\mathbb{P}_0)\).
Consider the model \(\xi\) defined by:
where the \(\beta_i\)’s are unknown parameters, the \(p_i\)’s form a basis of d-variate polynomials, and \(k\) is a continuous, strictly positive-definite function.
Parameter selection¶
In GPmp, covariance parameters are stored in a vector covparam. For
Matérn covariance models, the first entry is usually
\(\log(\sigma^2)\) and the remaining entries are log inverse
lengthscales, \(-\log(\rho_j)\).
The choice of selection criterion is part of the modeling problem. See Petit, Bect, Feliot, and Vazquez (2023) for an empirical comparison of parameter-selection criteria in GP interpolation.
Let \(z \in \mathbb{R}^n\) be the vector of observations, \(P \in \mathbb{R}^{n \times q}\) the matrix of mean basis functions evaluated at the observation points, and \(K_\theta \in \mathbb{R}^{n \times n}\) the covariance matrix for covariance parameters \(\theta\).
Maximum likelihood¶
For a parameterized mean \(P\beta\), maximum likelihood minimizes the negative log-likelihood after estimating the mean parameters. With
the ML criterion is
Restricted maximum likelihood¶
Restricted maximum likelihood (REML) integrates out the linear mean parameters. It is often preferable when the mean is unknown because it accounts for the degrees of freedom used to estimate the mean. Define
The REML criterion is
REMAP¶
Restricted maximum a posteriori (REMAP) adds a prior on covariance parameters to the restricted likelihood. If \(\pi(\theta)\) denotes the prior density, GPmp minimizes
where \(\mathrm{NLRL}\) is the negative log restricted likelihood. The prior can regularize poorly identified covariance parameters. See Stein (1999) and Chilès and Delfiner (1999) for background on kriging models and covariance parameterization. GPmp provides REMAP helpers with priors on \(\log(\sigma^2)\) and on log lengthscales.
Minimal sequence¶
The following code is a complete GPmp sequence on the four-dimensional Hartmann function. It creates observation points, defines a GP model, selects covariance parameters by REML, and predicts at test points. The observations are treated as noise-free. To use noisy observations or a nugget term, define a covariance function that adds the observation noise on the diagonal. See Noisy observations for a one-dimensional noisy-observation example and Noisy conditional sample paths for heteroscedastic noise in conditional sample paths.
The example pages extend this sequence in several directions: 1D interpolation gives the simplest one-dimensional case, 2D interpolation and Higher-dimensional interpolation show higher-dimensional interpolation, Custom covariance shows how to provide a custom covariance, ML / REML / REMAP parameter selection compares ML, REML, and REMAP, Posterior parameter sampling samples covariance parameters, and Dataloader-based parameter selection uses batched criterion evaluations.
The code below gives the complete setup used by the plots in this tutorial.
The mean function returns the matrix of mean basis functions evaluated at
x. Here the mean space is the one-dimensional space of constant functions.
The covariance parameters are selected by REML. After this call,
model.covparam contains the selected covariance parameters and info
contains optimization metadata and selection-criterion callables.
Prediction check¶
In dimension four, there is no direct curve to plot. A first check is therefore to compare the posterior mean with reference values at test points.
import matplotlib.pyplot as plt
import gpmp as gp
import gpmp.num as gnp
gnp.set_seed(1234)
dim = 4
box = [[0.0] * dim, [1.0] * dim]
xi = gp.misc.designs.ldrandunif(dim, 40, box)
zi = gp.misc.testfunctions.hartmann4(xi)
xt = gp.misc.designs.ldrandunif(dim, 300, box)
zt = gp.misc.testfunctions.hartmann4(xt)
def constant_mean(x, param):
return gnp.ones((x.shape[0], 1))
def covariance(x, y, covparam, pairwise=False):
p = 3
return gp.kernel.maternp_covariance(x, y, p, covparam, pairwise)
model = gp.Model(constant_mean, covariance)
model, info = gp.kernel.select_parameters_with_reml(model, xi, zi, info=True)
zpm, zpv = model.predict(xi, zi, xt)
zt_plot = zt.reshape(-1)
zpm_plot = zpm.reshape(-1)
plt.figure()
plt.plot(zt_plot, zpm_plot, "ko", markersize=3)
lo = min(*plt.xlim(), *plt.ylim())
hi = max(*plt.xlim(), *plt.ylim())
plt.plot([lo, hi], [lo, hi], "r--", linewidth=1)
plt.xlabel("reference value")
plt.ylabel("predicted mean")
plt.title("Hartmann4: GP prediction on test points")
plt.grid(True)
plt.show()
The resulting plot is:
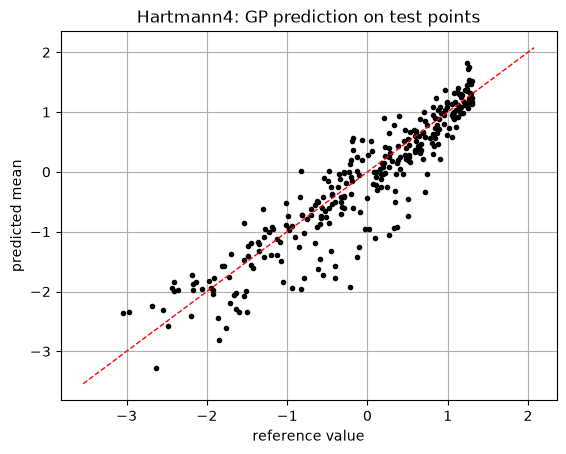
Points close to the red line indicate accurate prediction. Strong systematic curvature or a large vertical spread would indicate bias or large prediction errors.
Diagnosis output¶
The model-diagnosis tools print the parameter-selection report and prediction-performance metrics:
gp.modeldiagnosis.diag(model, info, xi, zi)
zloom, zloov, eloo = model.loo(xi, zi)
gp.modeldiagnosis.perf(
model,
xi,
zi,
loo=True,
loo_res=(zloom, zloov, eloo),
xtzt=(xt, zt),
zpmzpv=(zpm, zpv),
)
A typical output starts as follows:
[Model diagnosis]
* Parameter selection
cvg_reached: True
optimal_val: True
n_evals: 19
final_val: 29.4649
* Parameters
sigma2: log variance parameter
rho_0: log inverse lengthscale, denormalized rho about 0.71
rho_1: log inverse lengthscale, denormalized rho about 1.23
rho_2: log inverse lengthscale, denormalized rho about 0.53
rho_3: log inverse lengthscale, denormalized rho about 0.71
[Prediction performances]
LOO (n=40): Q2 = 0.770, rmse/std(z) = 0.479
Test (n=300): R2 = 0.599, rmse/std(z) = 0.633
Performance output:
[Prediction performances]
LOO (n=40)
value
std(z): 1.115
tss: 49.715
press: 5.390
press/tss: 0.108
log10(press/tss): -0.965
rmse: 0.367
rmse/std(z): 0.329
Q2: 0.892
Test (n=300)
value
std(z): 1.041
tss: 325.314
rss: 56.101
rss/tss: 0.172
log10(rss/tss): -0.763
rmse: 0.432
rmse/std(z): 0.415
R2: 0.828
The notation in the table is:
For leave-one-out (LOO) prediction, let \(e_i^{\mathrm{LOO}} = z_i - \widehat z_{-i}(x_i)\), where \(\widehat z_{-i}\) is computed without observation \(i\). GPmp reports
For a test set, let \(e_i^{\mathrm{test}} = z_i - \widehat z(x_i)\). GPmp reports
In both blocks,
\(\mathrm{RMSE} = \sqrt{\mathrm{SSE}/n}\), with
\(\mathrm{SSE}=\mathrm{PRESS}\) for LOO and
\(\mathrm{SSE}=\mathrm{RSS}\) for the test set. std(z) is the
empirical standard deviation of the reference values in the block.
rmse/std(z) is a scale-free error. press/tss and rss/tss are
error-to-variance ratios, so smaller values are better.
Check optimizer convergence first: cvg_reached and optimal_val should
be true. The parameter block then reports \(\log(\sigma^2)\) and the log
inverse lengthscales
\(-\log(\rho_j)\). In this Hartmann4 run, the selected lengthscales
are of comparable size, which means that the REML criterion does not
identify a clearly inactive coordinate. The performance report gives a
LOO Q2 and a test-set R2. Values close to one indicate accurate
prediction relative to the variance of the observed or test values.
What-if cross sections¶
Prediction cross sections show how predictions change in a local “what-if” analysis. They can be read as a local sweep study around an anchor point. Here the anchor is the observation with the smallest observed value. Starting from this point, one input coordinate is swept through its range while the other coordinates are kept fixed. Each panel shows the posterior mean and Gaussian coverage intervals along that one-dimensional slice. The grey points are the observations projected onto the swept coordinate. They help locate the data but should not be read as values that lie on the conditional slice.
import matplotlib.pyplot as plt
gp.plot.crosssections(model, xi, zi, box, ind_i="min", ind_dim=list(range(dim)))
plt.show()
The resulting plot is:
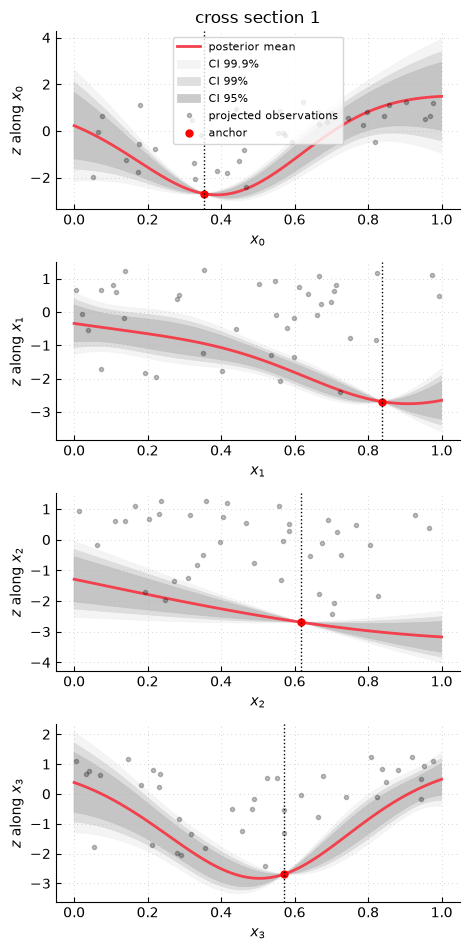
The vertical line marks the coordinate value of the best observed point. These plots should be read as local conditional predictions around that point. They show how the GP predictor changes when one input varies and the others stay fixed. The projected observations show where data are located along each coordinate, but they are not conditional observations on the slice. Wide intervals indicate regions where the model is uncertain along the slice, usually because observations provide little information there.
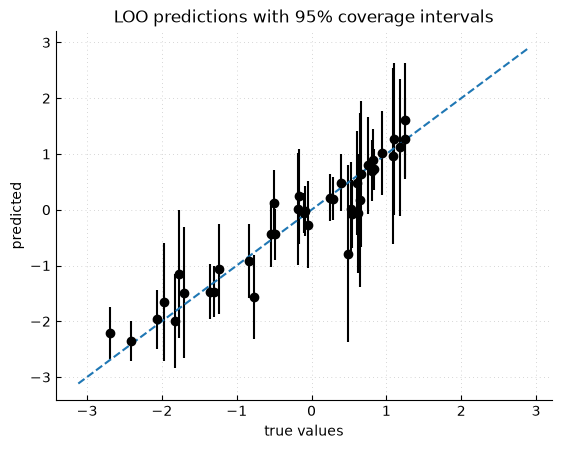
Leave-one-out diagnostics¶
Leave-one-out (LOO) predictions check whether the selected covariance parameters produce predictive intervals consistent with observed errors. In the plot below, each point is an observation predicted from all other observations. The vertical bars show nominal 95% predictive intervals. The same model object is used. No parameter selection is run again.
zloom, zloov, eloo = model.loo(xi, zi)
gp.plot.plot_loo(zi, zloom, zloov)
The resulting plot is:
For selection procedures built through gpmp.kernel, info
contains the optimized covariance parameters, optimization history, and
criterion callables used by diagnostics and posterior samplers.
REMAP variant¶
The same model can be selected with REMAP by replacing the selection call:
model, info = gp.kernel.select_parameters_with_remap(model, xi, zi, info=True)
For the current default REMAP prior, the prior anchor used for \(\log(\sigma^2)\) and log lengthscales is computed from the standard anisotropic initial guess unless explicit prior anchors are provided.