Custom covariance¶
This example shows how to define a covariance function outside GPmp’s built-in Matern helpers and use it in a one-dimensional interpolation example.
What this example does¶
The script defines a user covariance callable with the same signature expected
by gpmp.core.Model: covariance(x, y, covparam, pairwise=False).
It then builds a GP model from that covariance, selects covariance parameters,
and predicts on a dense one-dimensional grid.
Outputs¶
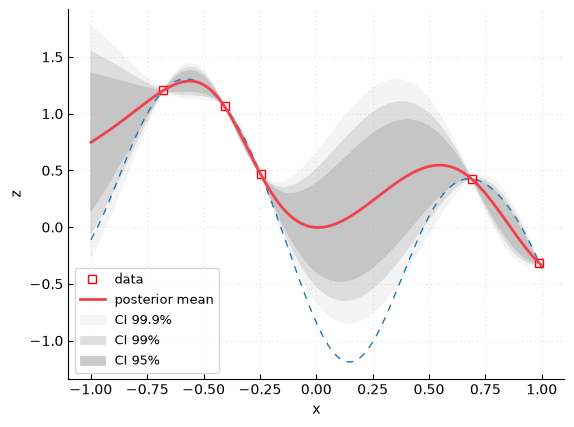
The displayed quantities are the reference function, observations, posterior mean, and uncertainty envelope obtained with the custom covariance. For a positive definite covariance and converged parameter selection, the posterior mean interpolates the noise-free observations and the uncertainty envelope widens where observations are sparse.
API points¶
Custom covariance functions should use
gpmp.numoperations when they must work with both NumPy and torch backends.The covariance callable must accept the
pairwiseargument used internally by GPmp prediction and likelihood routines.Once the model is built, parameter selection and prediction use the same API as for built-in covariance functions.
Covariance construction¶
gpmp.core.Model calls the covariance function in three situations:
k(x_i, x_i)Covariance matrix between observation points. In the example, this is handled by
kernel_ii_or_tt.k(x_i, x_t)Cross-covariance matrix between observation points and prediction points. In the example, this is handled by
kernel_it.k(x_t, x_t)Prior covariance at prediction points. GPmp uses only its diagonal when computing posterior variances, unless a full posterior covariance matrix is requested. In the example, this is also handled by
kernel_ii_or_tt.
The suffix ii_or_tt means “same-set covariance”: the two arguments are the
same point set, either observations x_i or prediction points x_t. The
suffix it means “cross covariance” between observations and prediction
points.
The pairwise flag controls the returned shape. With pairwise=False,
the covariance function returns a full matrix. With pairwise=True, it
returns the elementwise covariance vector
[k(x_0, y_0), ..., k(x_{n-1}, y_{n-1})]. When y is None, this is the
diagonal of k(x, x).
The wrapper kernel dispatches to the same-set or cross-set function. This
is the callable passed to gpmp.core.Model. The small nugget added in
kernel_ii_or_tt is numerical jitter on same-set covariance matrices. It is
not an observation-noise model.
The example uses a one-dimensional Matern covariance with
The custom part of the example is not the mathematical covariance itself, but the way the covariance callable is written and dispatched.
Script: examples/gpmp_example05_1d_custom_kernel.py
1"""
2GP interpolation in 1D, with noiseless data
3
4This example demonstrates how to compute GP interpolation with unknown mean
5(aka ordinary / intrinsic kriging) on a one-dimensional noiseless dataset.
6
7A Mat'ern covariance function is used for the Gaussian Process (GP) prior.
8The parameters of this covariance function are assumed to be known
9(i.e., no parameter estimation is performed here).
10
11The kriging predictor / posterior mean of the GP, interpolates the data.
12
13----
14Author: Emmanuel Vazquez <emmanuel.vazquez@centralesupelec.fr>
15Copyright (c) 2022-2026, CentraleSupelec
16License: GPLv3 (see LICENSE)
17----
18This example is based on the file stk_example_kb01.m from the STK at
19https://github.com/stk-kriging/stk/
20by Julien Bect and Emmanuel Vazquez, released under the GPLv3 license.
21
22Original copyright notice:
23
24 Copyright (c) 2015, 2016, 2018 CentraleSupelec
25 Copyright (c) 2011-2014 SUPELEC
26"""
27
28import math
29import numpy as np
30import gpmp.num as gnp
31import gpmp as gp
32
33
34def generate_data():
35 """
36 Data generation
37 (xt, zt): target
38 (xi, zi): input dataset
39 """
40 # Build (xt, zt)
41 dim = 1
42 nt = 200
43 box = [[-1], [1]]
44 xt = gp.misc.designs.regulargrid(dim, nt, box)
45 zt = gp.misc.testfunctions.twobumps(xt)
46
47 shuffle = True
48 if shuffle:
49 ni = 5
50 ind = np.random.choice(nt, ni, replace=False)
51 else:
52 ind = [10, 45, 100, 130, 160]
53 xi = xt[ind]
54 zi = zt[ind]
55
56 return xt, zt, xi, zi
57
58
59def zero_mean(x, param):
60 return None
61
62
63def constant_mean(x, param):
64 return gnp.ones((x.shape[0], 1))
65
66
67def kernel_ii_or_tt(x, param, pairwise=False):
68 """Same-set covariance k(x, x).
69
70 This function is used for observation-observation covariance k(x_i, x_i)
71 and prediction-prediction covariance k(x_t, x_t). With pairwise=True,
72 GPmp asks only for the diagonal vector.
73 """
74 p = 2
75 sigma2 = gnp.exp(param[0])
76 loginvrho = param[1]
77 # Numerical jitter for same-set covariance matrices, not observation noise.
78 nugget = 100 * gnp.eps
79
80 if pairwise:
81 # Return diag(k(x, x)) as a vector of shape (n,).
82 K = sigma2 * gnp.ones((x.shape[0], ))
83 else:
84 # Return the full same-set covariance matrix of shape (n, n).
85 K = gnp.scaled_distance(loginvrho, x, x)
86 K = sigma2 * gp.kernel.maternp_kernel(p, K) + nugget * gnp.eye(K.shape[0])
87
88 return K
89
90
91def kernel_it(x, y, param, pairwise=False):
92 """Cross-covariance k(x, y) between two point sets."""
93 p = 2
94 sigma2 = gnp.exp(param[0])
95 loginvrho = param[1]
96
97 if pairwise:
98 # Return [k(x_i, y_i)] as a vector of shape (n,).
99 K = gnp.scaled_distance_elementwise(loginvrho, x, y)
100 else:
101 # Return the full cross-covariance matrix of shape (n_x, n_y).
102 K = gnp.scaled_distance(loginvrho, x, y)
103
104 K = sigma2 * gp.kernel.maternp_kernel(p, K)
105 return K
106
107
108def kernel(x, y, param, pairwise=False):
109 """Dispatch covariance calls made by gpmp.core.Model."""
110 if y is x or y is None:
111 return kernel_ii_or_tt(x, param, pairwise)
112 else:
113 return kernel_it(x, y, param, pairwise)
114
115
116def visualize(xt, zt, xi, zi, zpm, zpv):
117 fig = gp.plot.Figure(isinteractive=True)
118 fig.plot(xt, zt, 'C0', linestyle=(0, (5, 5)), linewidth=1.0)
119 fig.plotdata(xi, zi)
120 fig.plotgp(xt, zpm, zpv)
121 fig.xylabels('x', 'z')
122 fig.show(grid=True, legend=True, legend_fontsize=9)
123
124
125def main():
126 xt, zt, xi, zi = generate_data()
127 mean = constant_mean
128 meanparam = None
129
130 covparam = gnp.array([math.log(0.5**2), # log(sigma2)
131 math.log(1 / .7)]) # log(1/rho)
132
133 model = gp.core.Model(mean, kernel, meanparam, covparam)
134
135 zpm, zpv = model.predict(xi, zi, xt)
136 visualize(xt, zt, xi, zi, zpm, zpv)
137
138
139if __name__ == "__main__":
140 main()