Posterior parameter sampling¶
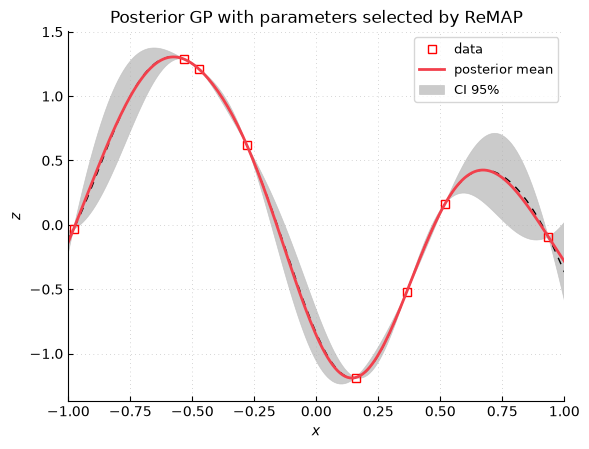
This example demonstrates REMAP-based parameter selection followed by posterior
sampling of GP covariance parameters. It is intended for cases where point
estimates of covparam are not enough and uncertainty over covariance
parameters should be explored explicitly.
What this example does¶
The rendered preview performs REMAP parameter selection and plots the posterior prediction. The full script continues by sampling the posterior distribution of covariance parameters with MCMC methods. For documentation build time, the rendered preview stops before the expensive sampling loop.
Mathematical target¶
The samplers work on the covariance-parameter vector \(\theta=\mathrm{covparam}\). With the REMAP criterion used in the script, the posterior target is represented through the negative log density
where \(C\) does not depend on \(\theta\). Equivalently,
The MCMC output explores uncertainty over \(\theta\); it is separate from the conditional uncertainty of \(Z_t=Z(x_t)\) for a fixed \(\theta\).
How to interpret the sampling procedure¶
REMAP provides a regularized starting point and prior definition. Posterior sampling then explores nearby and competing covariance-parameter values according to the selection criterion interpreted as a negative log density. The resulting chains or particles can be used to assess whether the selected covariance parameters are well identified.
API points¶
select_parameters_with_remap_gaussian_logsigma2_and_logrho_priorselects a regularized covariance vector and defines criterion callables ininfo.Posterior samplers in
gpmp.mcmcuseinfo.selection_criterion_nogradas a negative log-density when possible.Use sampling diagnostics before interpreting posterior parameter samples.
Script: examples/gpmp_example23_1d_interpolation_posterior_sampling.py
1"""
2Demonstrates ReMAP-based GP parameter selection, posterior sampling,
3and visualization of a 1D Gaussian process model.
4
5Author: Emmanuel Vazquez <emmanuel.vazquez@centralesupelec.fr>
6Copyright (c) 2022-2026, CentraleSupelec
7License: GPLv3 (see LICENSE)
8"""
9
10import gpmp.num as gnp
11import gpmp as gp
12from gpmp.mcmc.param_posterior import (
13 sample_from_selection_criterion_mh,
14 sample_from_selection_criterion_nuts,
15)
16import matplotlib.pyplot as plt
17from matplotlib import interactive
18
19
20def generate_data():
21 """
22 Data generation.
23
24 Returns
25 -------
26 tuple
27 (xt, zt): target data
28 (xi, zi): input dataset
29 """
30 dim = 1
31 nt = 200
32 box = [[-1], [1]]
33 xt = gp.misc.designs.regulargrid(dim, nt, box)
34 zt = gp.misc.testfunctions.twobumps(xt)
35
36 ni = 8
37 xi = gp.misc.designs.ldrandunif(dim, ni, box)
38 zi = gp.misc.testfunctions.twobumps(xi)
39
40 return xt, zt, xi, zi
41
42
43def constant_mean(x, param):
44 return gnp.ones((x.shape[0], 1))
45
46
47def kernel(x, y, covparam, pairwise=False):
48 p = 3
49 return gp.kernel.maternp_covariance(x, y, p, covparam, pairwise)
50
51
52def visualize_results(xt, zt, xi, zi, zpm, zpv):
53 """
54 Visualize the results using gp.plot.plotutils (a matplotlib wrapper).
55
56 Parameters
57 ----------
58 xt : numpy.ndarray
59 Target x values
60 zt : numpy.ndarray
61 Target z values
62 xi : numpy.ndarray
63 Input x values
64 zi : numpy.ndarray
65 Input z values
66 zpm : numpy.ndarray
67 Posterior mean
68 zpv : numpy.ndarray
69 Posterior variance
70 """
71 fig = gp.plot.Figure(isinteractive=True)
72 fig.plot(xt, zt, "k", linewidth=1, linestyle=(0, (5, 5)))
73 fig.plotdata(xi, zi)
74 fig.plotgp(xt, zpm, zpv, colorscheme="simple")
75 fig.xylabels("$x$", "$z$")
76 fig.title("Posterior GP with parameters selected by ReMAP")
77 fig.show(grid=True, xlim=[-1.0, 1.0], legend=True, legend_fontsize=9)
78
79
80def main():
81 xt, zt, xi, zi = generate_data()
82
83 model = gp.core.Model(constant_mean, kernel)
84
85 # Automatic selection of parameters using ReMAP
86 model, info = (
87 gp.kernel.select_parameters_with_remap_gaussian_logsigma2_and_logrho_prior(
88 model, xi, zi, info=True
89 )
90 )
91 gp.modeldiagnosis.diag(model, info, xi, zi)
92
93 # Prediction
94 zpm, zpv = model.predict(xi, zi, xt)
95
96 sampler = "nuts" # "mh" or "nuts"
97 n_chains = 4
98 nuts_init_box = None
99 if hasattr(info, "bounds") and info.bounds is not None:
100 nuts_init_box = [
101 [b[0] for b in info.bounds],
102 [b[1] for b in info.bounds],
103 ]
104
105 if sampler == "mh":
106 samples, _sampler_state = sample_from_selection_criterion_mh(
107 info,
108 n_steps_total=10_000,
109 burnin_period=5_000,
110 n_chains=n_chains,
111 show_progress=True,
112 )
113 elif sampler == "nuts":
114 samples, _sampler_state = sample_from_selection_criterion_nuts(
115 info,
116 num_samples=500,
117 num_warmup=1_000,
118 n_chains=n_chains,
119 init_box=nuts_init_box,
120 progress=True,
121 )
122 else:
123 raise ValueError("Unknown sampler. Use 'mh' or 'nuts'.")
124
125 # Visualization
126 print("\nVisualization")
127 print("-------------")
128 interactive(True)
129 plot_likelihood_cross_sections = True
130 plot_likelihood_2d_profile = True
131 if plot_likelihood_cross_sections:
132 gp.modeldiagnosis.plot_selection_criterion_crosssections(
133 info=info, delta=0.6, param_names=["log(sigma^2)", "log(1/rho)"]
134 )
135 if plot_likelihood_2d_profile:
136 gp.modeldiagnosis.plot_selection_criterion_sigma_rho(
137 model, info, criterion_name="log posterior"
138 )
139
140 plt.scatter(
141 gnp.log10(gnp.exp(samples[0, :, 0] / 2)),
142 gnp.log10(gnp.exp(-samples[0, :, 1])),
143 alpha=0.2,
144 )
145
146 visualize_results(xt, zt, xi, zi, zpm, zpv)
147
148
149if __name__ == "__main__":
150 main()