2D interpolation¶
This example builds an anisotropic Matern GP on a two-dimensional test function. It illustrates the same modeling sequence as the 1D interpolation example, but with a two-dimensional input space and contour plots for spatial diagnostics.
What this example does¶
The script selects a two-dimensional test function, draws observation points,
constructs a GP model, and selects covariance parameters with a REMAP criterion.
The covariance vector follows the GPmp convention
[log(sigma2), -log(rho_0), -log(rho_1)]. The selected model is evaluated on
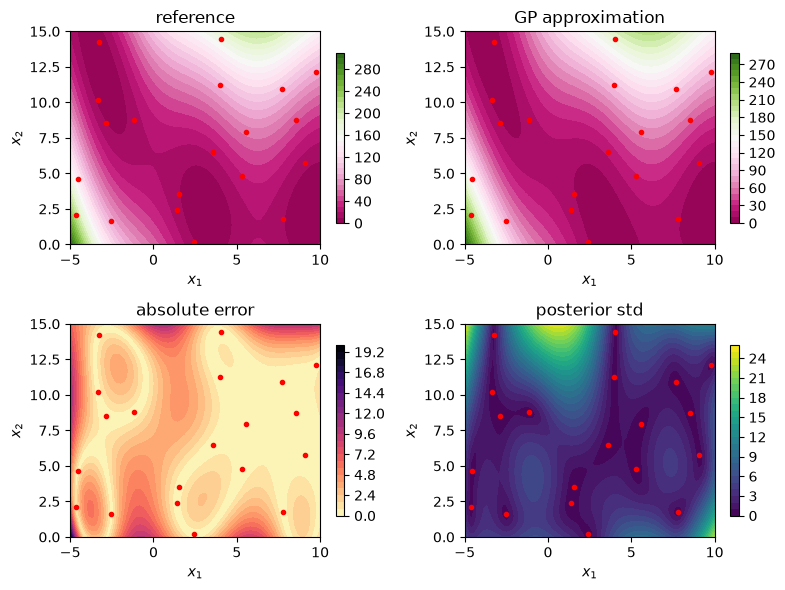
a regular grid to compare the reference function and the GP approximation.
Mathematical object¶
The model is the same noise-free conditional GP as in the 1D interpolation example, but with two-dimensional points \(x=(x_1,x_2)\). The anisotropic Matern kernel uses the scaled distance
The two lengthscales control smoothing along the two coordinate axes. Small \(\rho_j\) allows faster variation along coordinate \(j\); large \(\rho_j\) makes the posterior vary more slowly along that coordinate.
Outputs¶
The four panels contain the reference function, GP posterior mean, absolute prediction error, and posterior standard deviation. Red dots mark observation points. The error and posterior standard deviation panels should be read together: a well-calibrated model should assign larger uncertainty in regions with sparse observations or difficult extrapolation.
API points¶
gp.misc.designs.ldrandunifcreates a space-filling observation design.gp.kernel.select_parameters_with_remapselects covariance parameters with the default REMAP criterion.model.predictreturns posterior means and variances at the grid points.Convert backend arrays with
gnp.to_npbefore sending them to Matplotlib functions that expect NumPy arrays.
Script: examples/gpmp_example03_2d.py
1"""
2Gaussian processes in 2D
3
4An anisotropic Matern covariance function is used for the Gaussian
5Process (GP) prior. The parameters of this covariance function
6(variance and ranges) are estimated using the Restricted Maximum
7A Posteriori (ReMAP) method.
8
9The mean function of the GP prior is assumed to be constant and
10unknown.
11
12The function is sampled on a space-filling Latin Hypercube design, and
13the data is assumed to be noiseless.
14
15----
16Author: Emmanuel Vazquez <emmanuel.vazquez@centralesupelec.fr>
17Copyright (c) 2022-2026, CentraleSupelec
18License: GPLv3 (see LICENSE)
19----
20This example is based on the file stk_example_kb03.m from the STK at
21https://github.com/stk-kriging/stk/
22by Julien Bect and Emmanuel Vazquez, released under the GPLv3 license.
23
24Original copyright notice:
25
26 Copyright (c) 2015, 2016, 2018 CentraleSupelec
27 Copyright (c) 2011-2014 SUPELEC
28----
29"""
30
31import numpy as np
32import gpmp.num as gnp
33import gpmp as gp
34import matplotlib.pyplot as plt
35
36
37# Test function selection
38def select_test_function(case_num):
39 if case_num == 1:
40 f = gp.misc.testfunctions.braninhoo
41 dim = 2
42 box = [[-5, 0], [10, 15]]
43 ni = 20
44 elif case_num == 2:
45 f = gp.misc.testfunctions.wave
46 dim = 2
47 box = [[-1, -1], [1, 1]]
48 ni = 40
49 return f, dim, box, ni
50
51
52def create_model():
53 def constant_mean(x, param):
54 return gnp.ones((x.shape[0], 1))
55
56 def kernel(x, y, covparam, pairwise=False):
57 p = 6
58 return gp.kernel.maternp_covariance(x, y, p, covparam, pairwise)
59
60 return gp.Model(constant_mean, kernel)
61
62
63def main():
64 case_num = 1
65 f, dim, box, ni = select_test_function(case_num)
66
67 # Compute the function on a 80 x 80 regular grid
68 nt = [80, 80]
69 xt = gp.misc.designs.regulargrid(dim, nt, box)
70 zt = f(xt)
71
72 design_type = "ld"
73 if design_type == "lhs":
74 xi = gp.misc.designs.maximinlhs(dim, ni, box)
75 elif design_type == "ld":
76 xi = gp.misc.designs.ldrandunif(dim, ni, box)
77 zi = f(xi)
78
79 model = create_model()
80
81 # Parameter selection
82 model, info = gp.kernel.select_parameters_with_remap(model, xi, zi, info=True)
83 gp.modeldiagnosis.diag(model, info, xi, zi)
84
85 # Prediction
86 (zpm, zpv) = model.predict(xi, zi, xt)
87
88 # Visualization
89 contour_lines = 30
90 xt_np = gnp.to_np(xt)
91 xi_np = gnp.to_np(xi)
92 zt_np = gnp.to_np(zt).reshape(nt)
93 zpm_np = gnp.to_np(zpm).reshape(nt)
94 zsd_np = np.sqrt(np.maximum(gnp.to_np(zpv).reshape(nt), 0.0))
95
96 fig, axes = plt.subplots(nrows=2, ncols=2)
97 data = [zt_np, zpm_np, np.abs(zpm_np - zt_np), zsd_np]
98 titles = [
99 "function to be approximated",
100 f"approximation from {ni} points",
101 "true approx error",
102 "posterior std",
103 ]
104 cmaps = ["PiYG", "PiYG", "magma_r", "viridis"]
105
106 for ax, z, title, cmap in zip(axes.flat, data, titles, cmaps):
107 cs = ax.contourf(
108 xt_np[:, 0].reshape(nt),
109 xt_np[:, 1].reshape(nt),
110 z,
111 levels=contour_lines,
112 cmap=cmap,
113 )
114 ax.plot(xi_np[:, 0], xi_np[:, 1], "ro", label="data")
115 ax.set_title(title)
116 ax.set_xlabel("$x_1$")
117 ax.set_ylabel("$x_2$")
118 ax.legend()
119 fig.colorbar(cs, ax=ax, shrink=0.9)
120
121 plt.show()
122
123 # Predictions vs truth
124 plt.figure()
125 plt.plot(zt, zpm, "ko")
126 (xmin, xmax), (ymin, ymax) = plt.xlim(), plt.ylim()
127 xmin = min(xmin, ymin)
128 xmax = max(xmax, ymax)
129 plt.plot([xmin, xmax], [xmin, xmax], "--")
130 plt.xlabel("true values")
131 plt.ylabel("predictions")
132 plt.show()
133
134 # LOO predictions
135 zloom, zloov, eloo = model.loo(xi, zi)
136 gp.plot.plot_loo(zi, zloom, zloov)
137
138 gp.plot.crosssections(model, xi, zi, box, ind_i=[0, 10], ind_dim=[0, 1])
139
140
141if __name__ == "__main__":
142 main()