Example 41: set inversion with BSS-style particles¶
Script: examples/example41_setinversion_smc.py
Purpose¶
The script estimates an inverse image with SetInversionBSS. It replaces the
fixed grid of example40 by a particle population and moves from an initial
box to a target box through an interpolation parameter mu. The particle
update follows the BSS idea of representing a sequence of probability targets
[1]. The box probabilities are the same type of Gaussian
probabilities used in constrained Bayesian optimization
[3].
What is computed¶
posterior mean and variance at particle positions.
the intermediate box
B(mu) = (1 - mu) B_init + mu B_target.a target log-density proportional to box-membership probability inside the input box.
SMC reweighting, resampling, and Markov moves of the particle population.
box-membership probabilities and box weighted-MSE values at the current box.
Main objects¶
gpmpcontrib.optim.setinversion.SetInversionBSSgpmpcontrib.SequentialStrategyBSSgpmp.mcmc.smc.SMC
Outputs¶
Run python examples/example41_setinversion_smc.py from the repository root
to execute the example. Regenerate the static figure with
cd docs && python make_example_results.py.
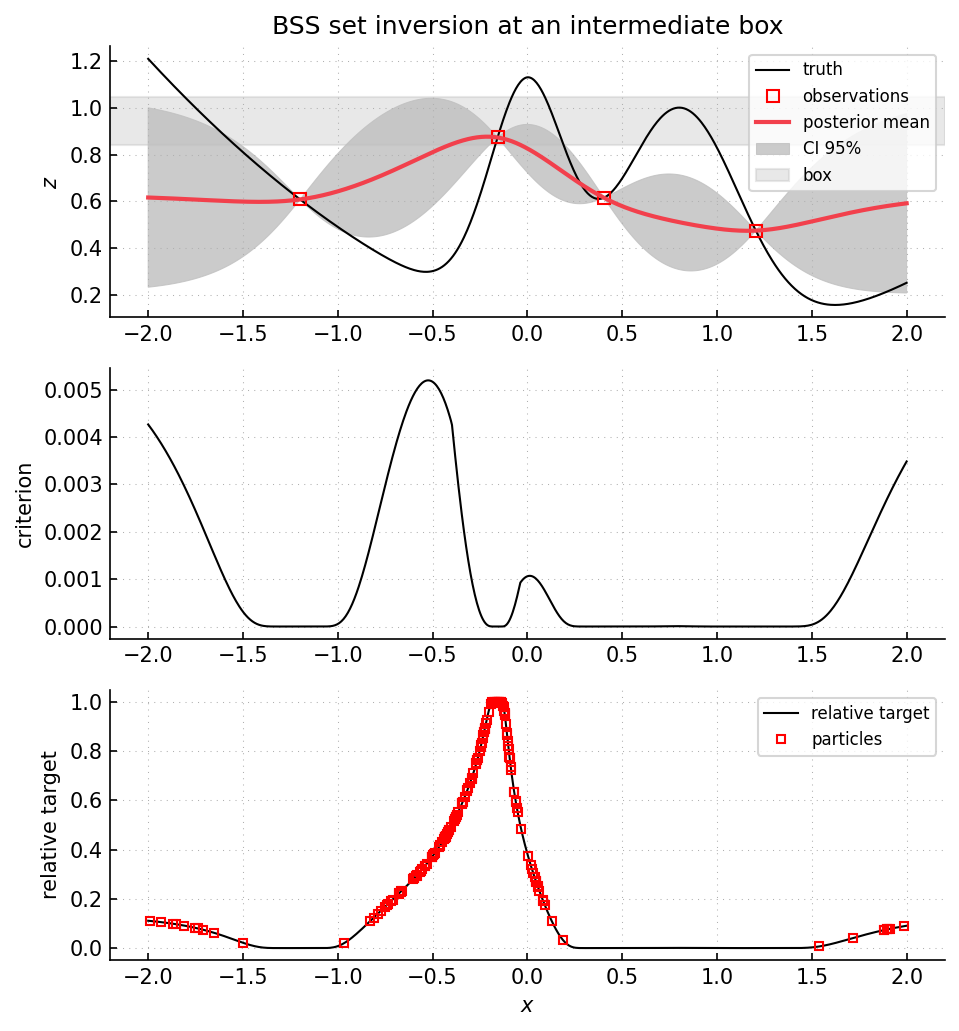
Intermediate output box with mu = 0.85. Lower panel: box-membership
probability with SMC particles. Particle heights show the current target
density up to a multiplicative constant.¶
Source excerpt¶
# -- define a mono-objective problem
problem = gpc.ComputerExperiment(
1, # dim of search space
[[-2.0], [2.0]], # search box
single_function=test_function, # test function
)
# -- create initial dataset
nt = 20 * 100
xt = gp.misc.designs.regulargrid(problem.input_dim, nt, problem.input_box)
zt = problem(xt)
ni = 4
ind = [i * 20 for i in [20, 46, 60, 80]]
xi = xt[ind]
# -- initialize a model and the ei algorithm
model = gpc.Model_ConstantMean_Maternp_REML(
"GP1d",
output_dim=problem.output_dim,
mean_specification={"type": "constant"},
covariance_specification={"p": 2},
)
box_init = gnp.array([[-0.0], [1.2]])
box_target = gnp.array([[0.99], [1.02]])
beta = 1.0
algo = si.SetInversionBSS(problem, model, box_init, box_target, options={"beta": beta})
algo.set_initial_design(xi)
# -- visualization
def plot(show=True, x=None, z=None):
zpm, zpv = algo.predict(xt, convert_out=False)
crit, _ = sampcrit.box_wMSE(algo.box_current, zpm, zpv)
pe, _ = sampcrit.box_probability(algo.box_current, zpm, zpv)
fig = gp.plot.Figure(nrows=3, ncols=1, isinteractive=True, figsize=(10, 8))
fig.subplot(1)